这个测试的目的是评估空气流量计从怠速到节气门全开再到完全松开油门踏板过程中的输出电压和响应时间。
如何进行测试
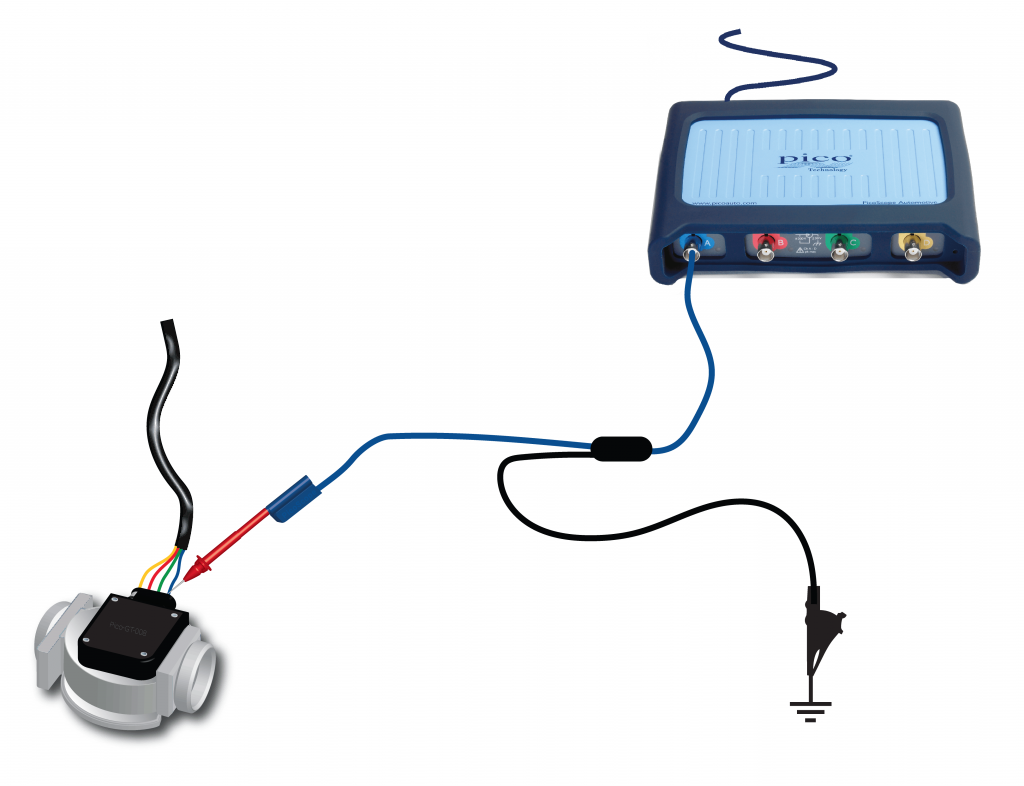
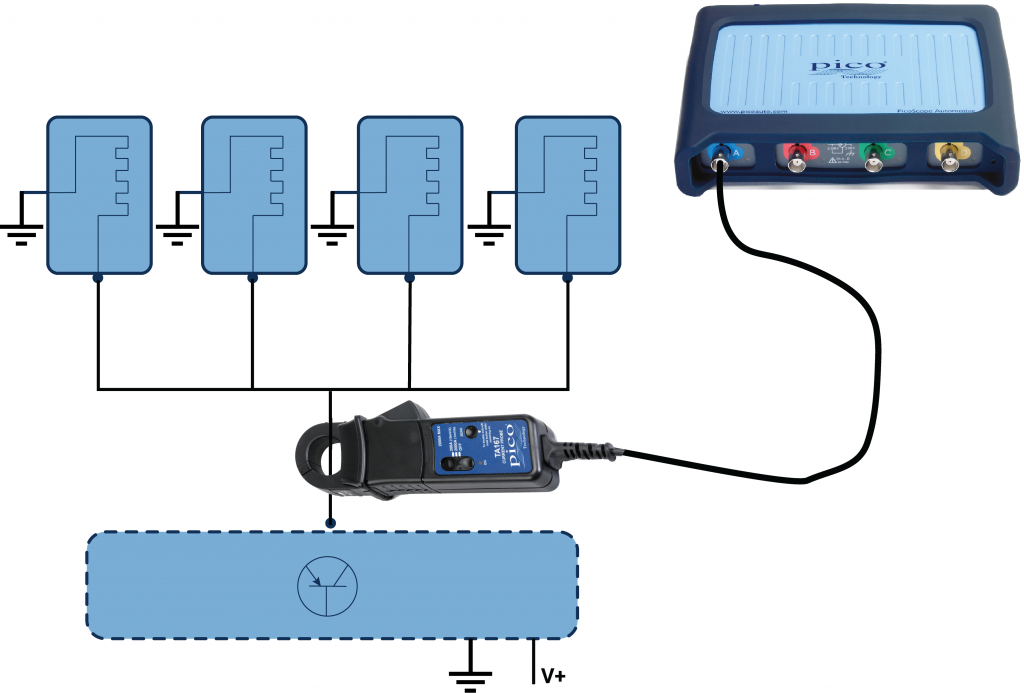
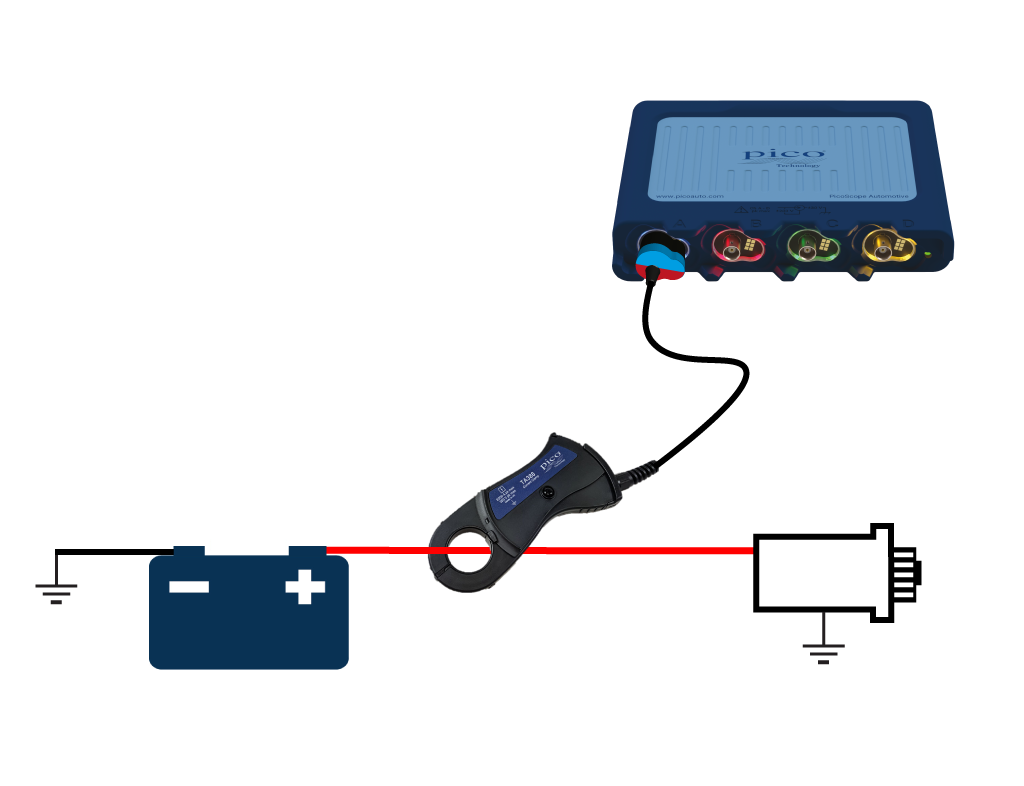
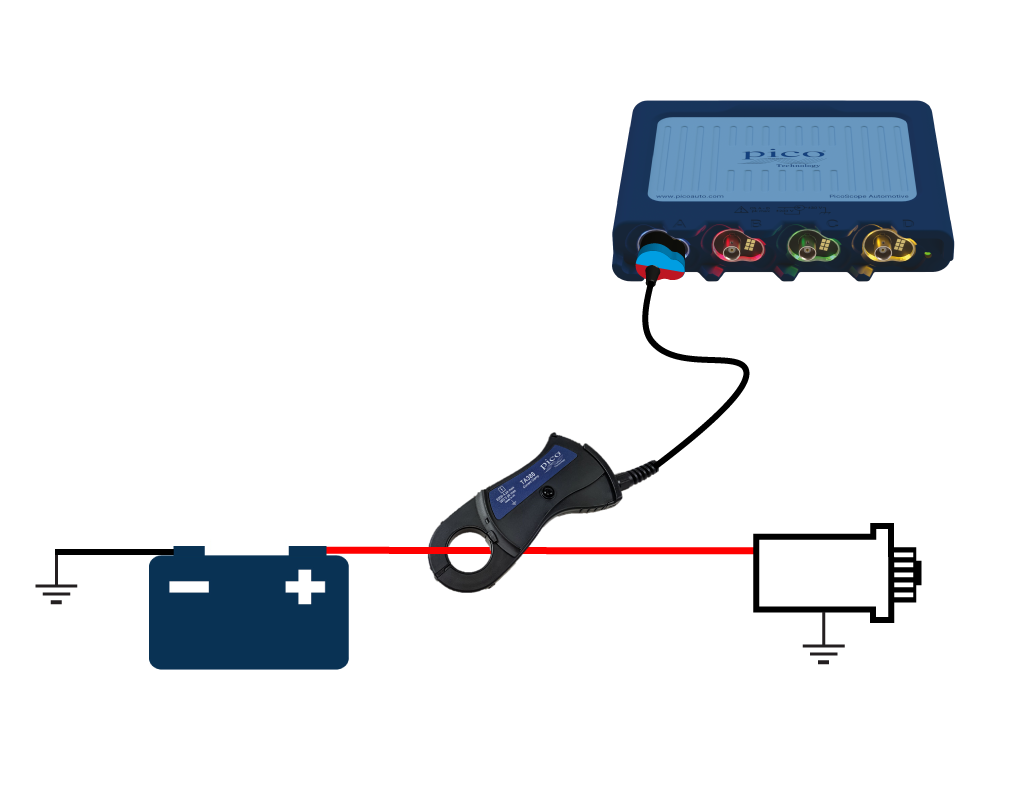
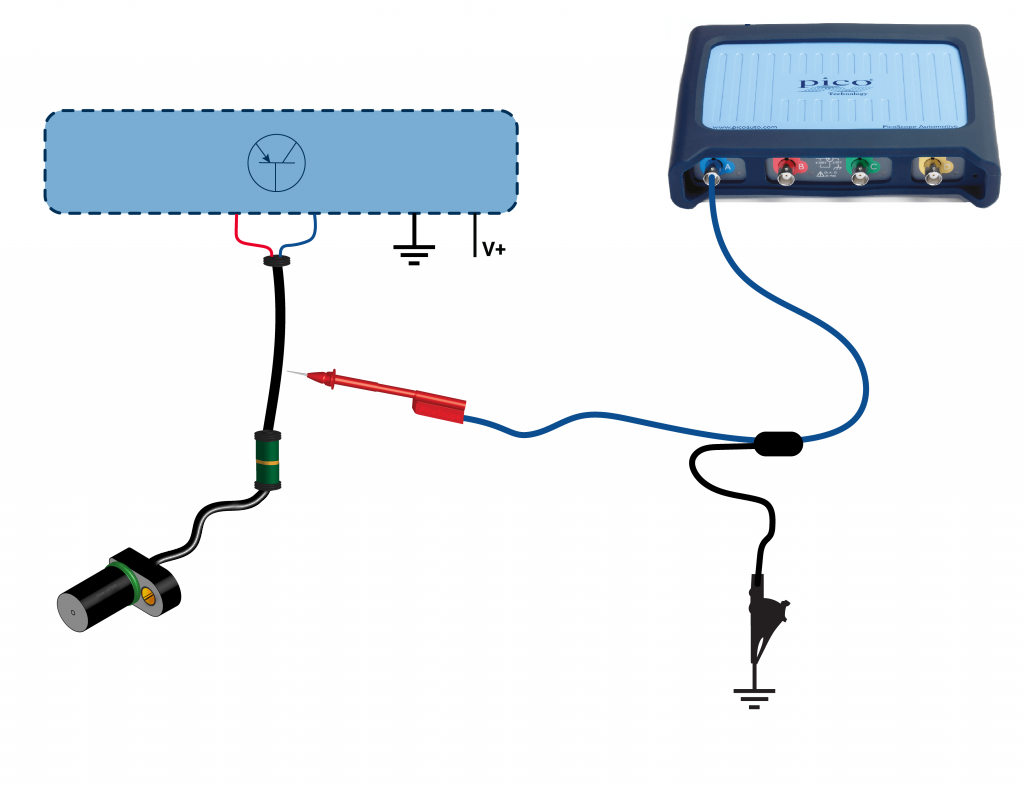
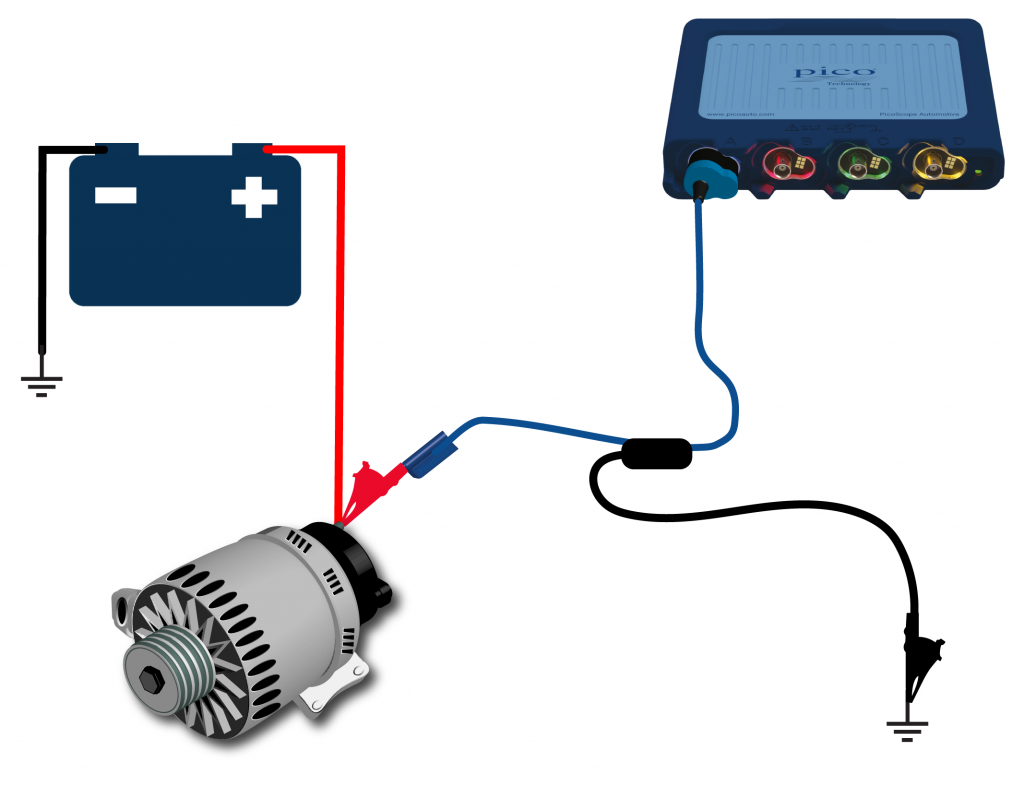
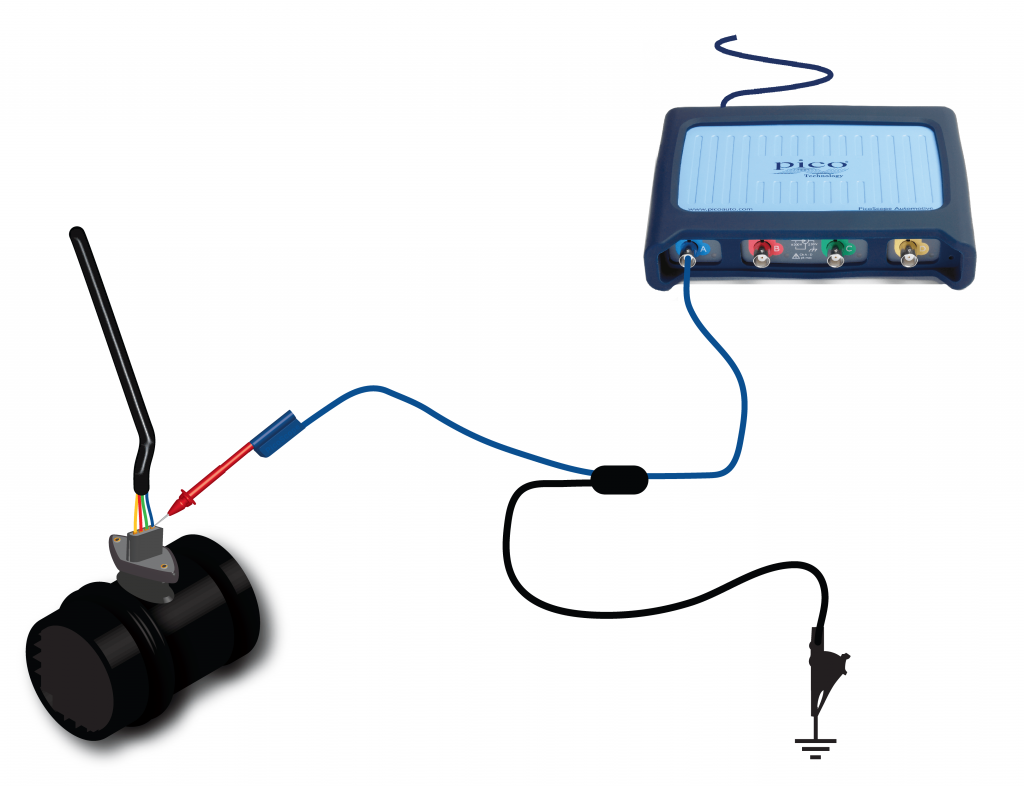
●根据汽车制造商提供的资料查找出空气流量计的输出端子。
●连接一条BNC测试线到示波器A通道,测试线正极接在空气流量计的输出信号线上,负极搭铁。
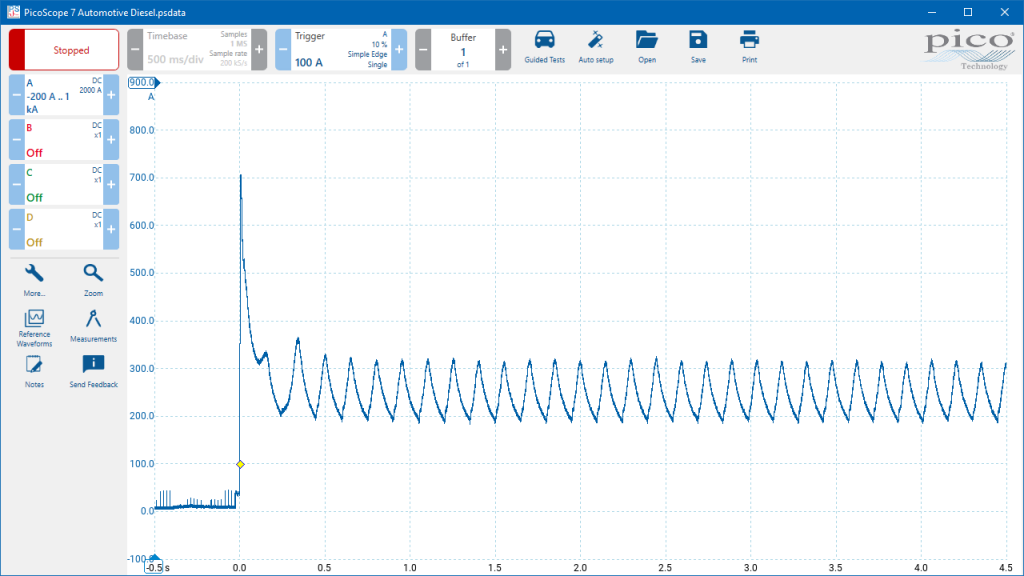
●最小化此帮助页面,您会看到PicoScope软件界面加载了一个示例波形,而且预设好了软件以便您采集
●点击”开始”,开始观察实时读数。
●起动发动机。
●将油门踏板踩到底,直至发动机转速升到最高,然后再松开油门踏板。
●采集到波形后,“停止“示波器运行。
●关闭发动机。
●使用波形缓冲区、放大以及测量等工具来观察和分析波形。
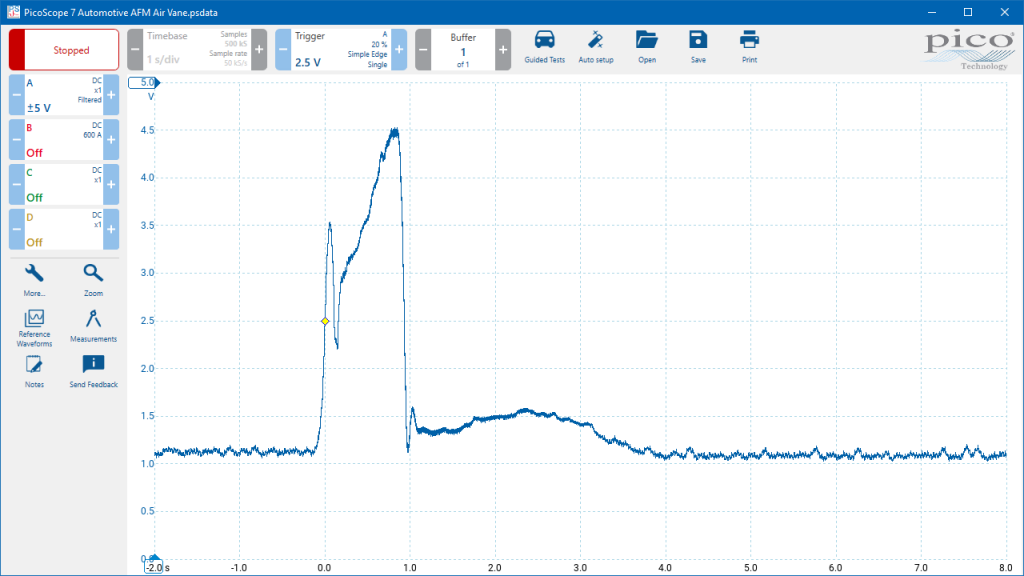
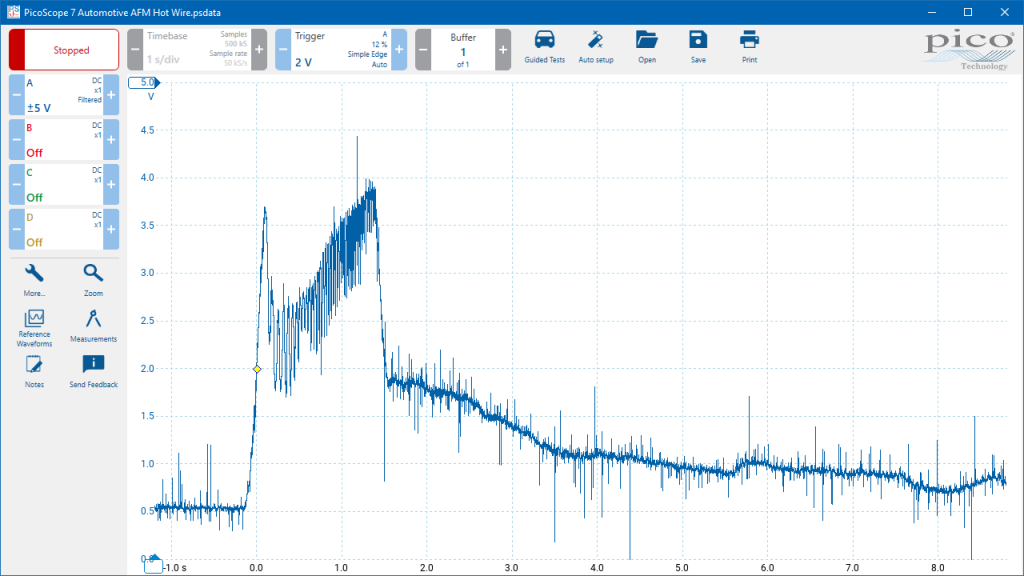
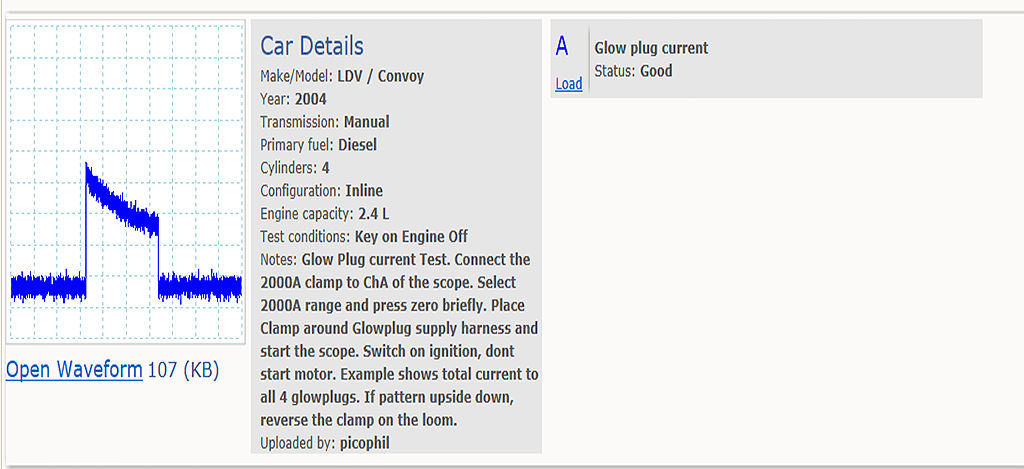
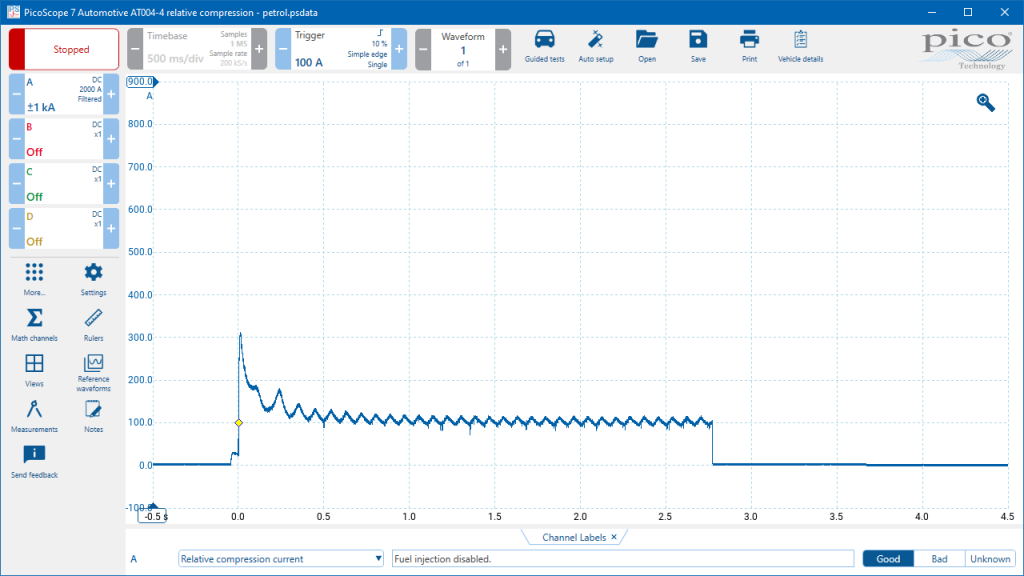
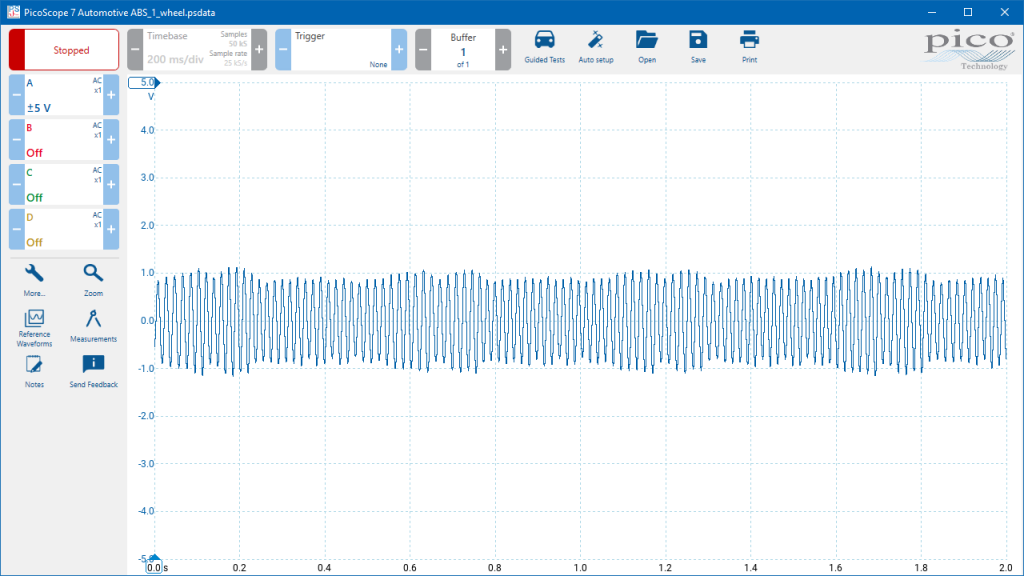
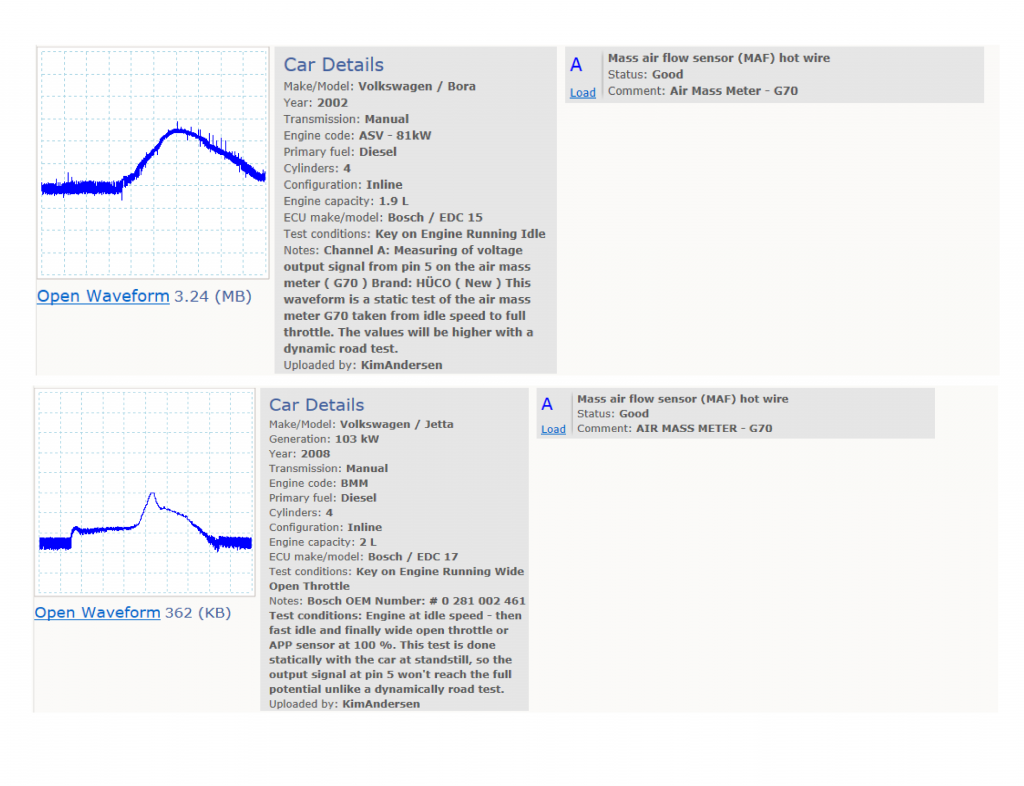
示例波形
波形注意点
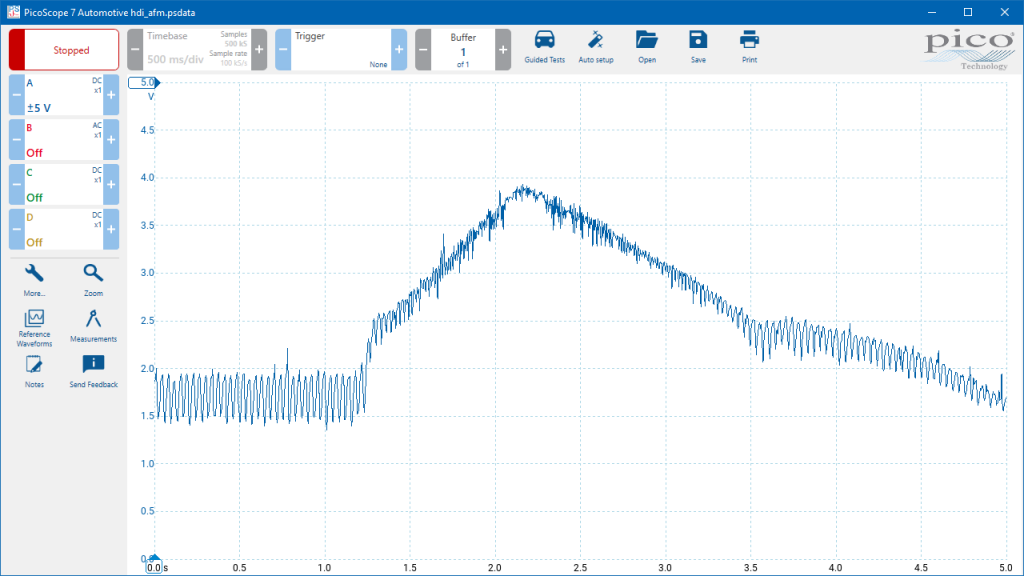
这个波形有以下特征:
●发动机怠速时,输出电压约为1.5V-2.0 V。
●迅速踩下油门到底,发动机转速升高,输出电压会快速上升,产生峰值电压(超过4.0V)。
●松开油门踏板后,发动机转速和信号电压迅速降低。
●在装有怠速控制阀的发动L上,最后的电压会逐渐下降,因为这样可以让发动机慢慢地回归基础怠速(防失速特性)。这个功能通常只在发动机转速从约1200 rpm回归怠速设置时起作用。
●波形上的“毛刺”归因于发动机运行中进气脉冲的真空变化。
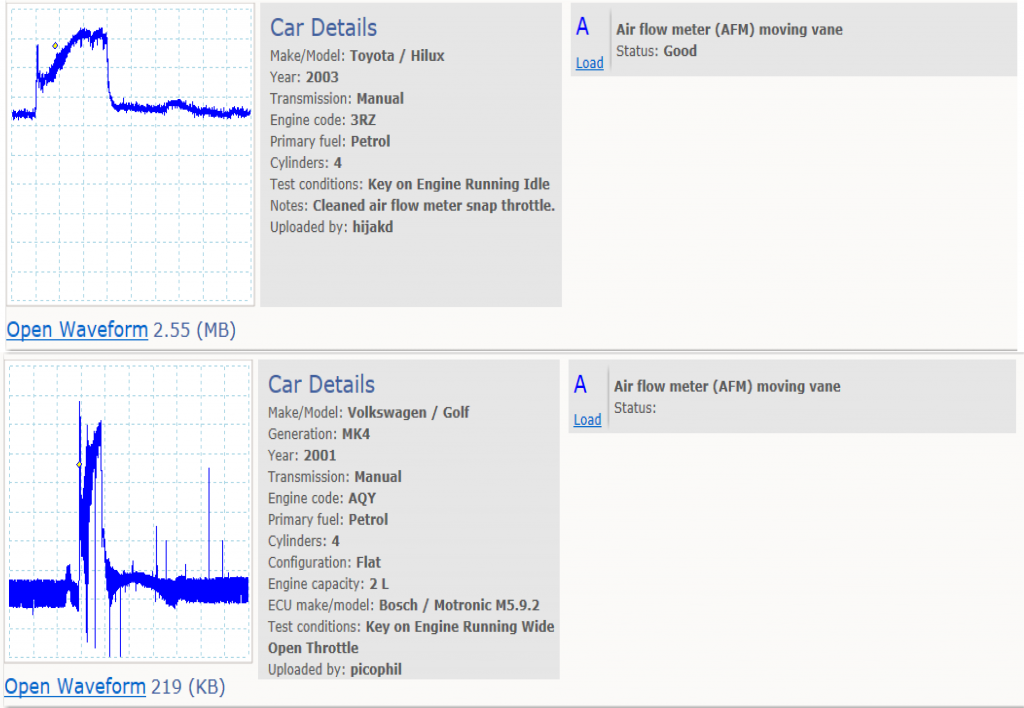
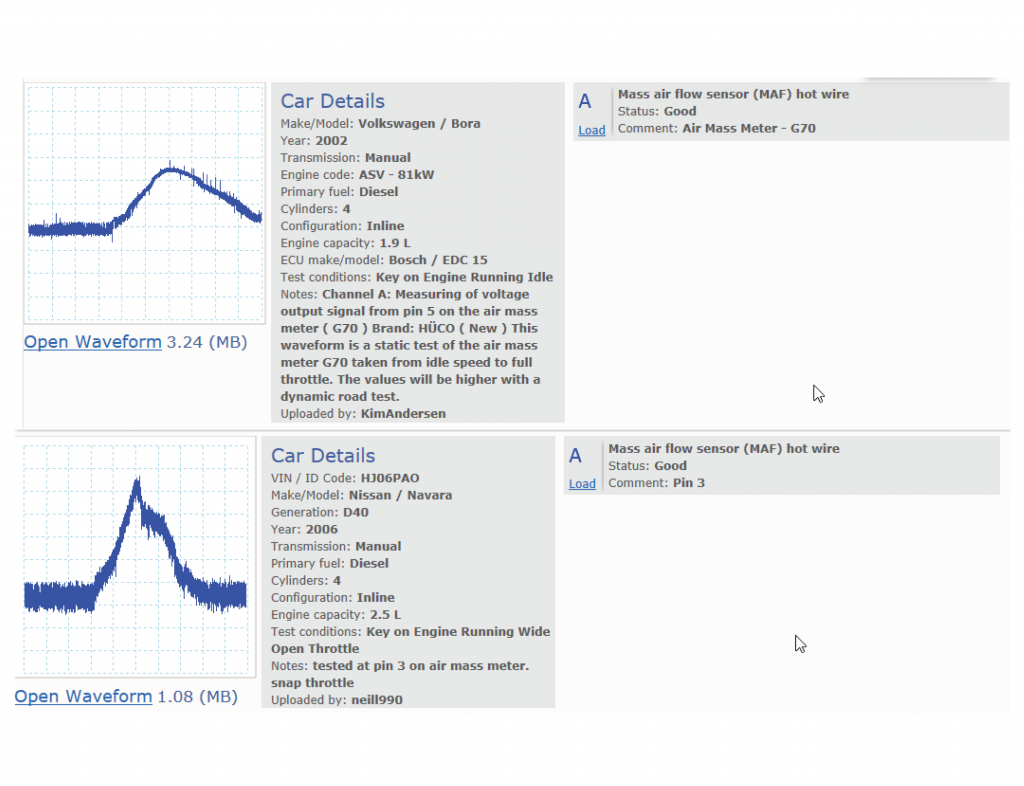
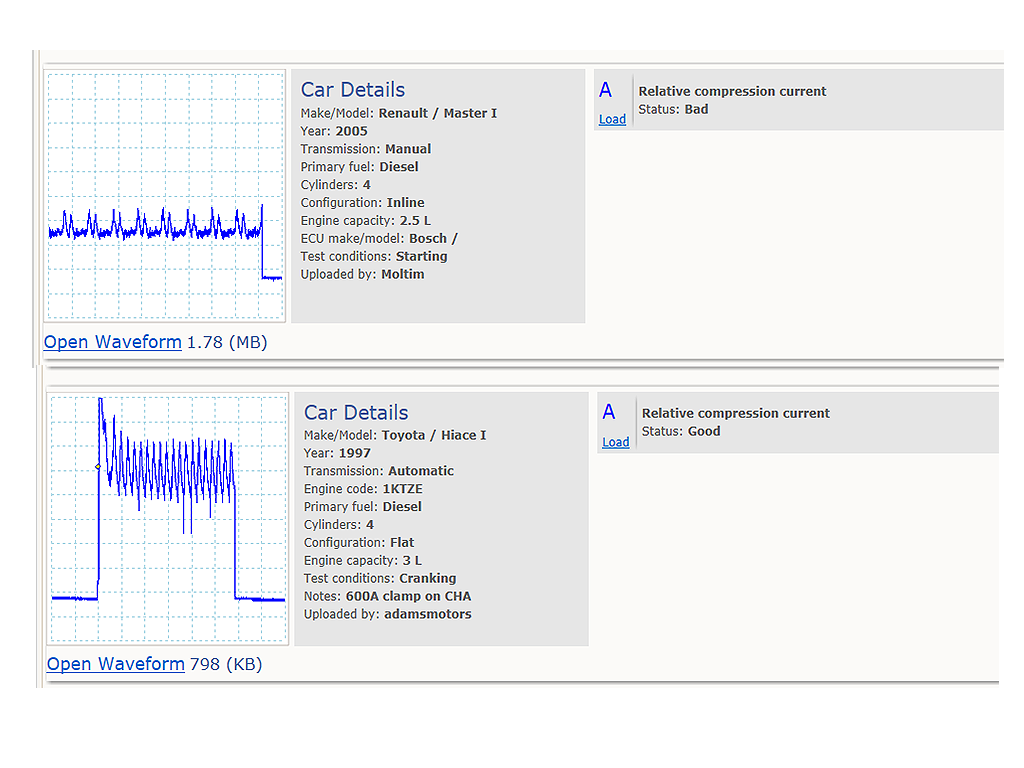
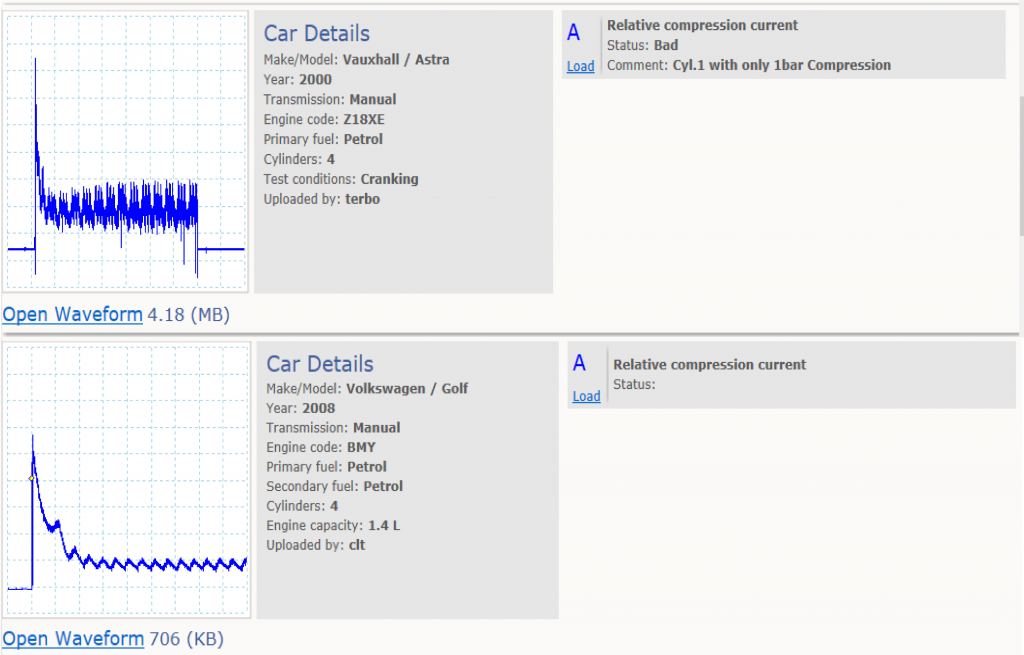
波形库
在波形库添加通道的下拉菜单中选择Mass air flow sensor (MAF) hot wire.
更多信息
空气流量计(AFM)的电压输出应该与空气流量成线性关系。
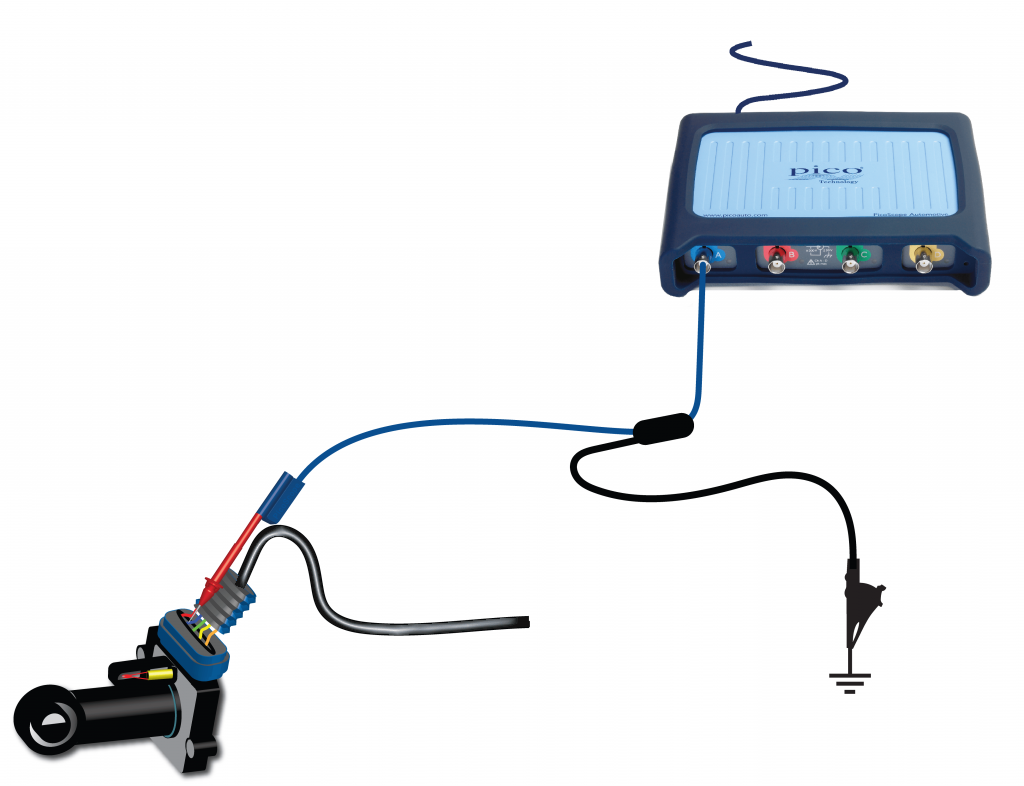
Bosch共轨柴油系统可以是涡轮增压,也可以是自然吸气的。这两种方式的空气流量计都安装在接近空气滤清器附近。
空气流量计监测空气的数量,并向ECM提供相关的数据。它利用传统的“热膜”式来监测空气的数量。进气流经热膜产生冷却效应,改变输出电压。空气流量计(AFM)输出端子的电压与空气流量直接成比例关系,当空气流量增加时电压也增加。
这个部件用的是6针脚的连接器(只使用了5个端子,因为编号4是空的),所有端子连接到ECM上。

诊断故障代码
相关故障代码:
P0100 P0101 P0102 P0103 P0104