该测试的目的是使用倒车雷达探头评估超声波泊车传感器是否工作正常。
如何进行测试
- 连接一个倒车雷达探头到 示波器 A通道。
- 最小化此帮助页面,您会看到 PicoScope软件界面 加载了一个示例波形,而且预设好了软件以便您采集波形。
- 点击“开始” ,开始观察实时数据。
- 激活车辆的泊车传感器,您可能需要其他人的协助以确保人身安全。
- 将倒车雷达探头保持在距离泊车传感器表面 25 毫米左右的位置。
- 将倒车雷达探头直接对准泊车传感器时,以画圈移动的方式操纵探头获得最佳信号。
- 采集到波形后,“停止” 示波器运行。
- 将车辆恢复到安全的静止位置(发动机关闭)。
- 使用 波形缓冲区、 放大 以及 测量 等工具来观察和分析波形。
请注意:
您可能需要在发动机运转(并且离合器分离)的情况下将变速箱挂到前进档或倒档,才能激活泊车传感器系统。如果是这样,则必须由合格的驾驶员始终控制着车辆。因此在泊车传感器系统测试期间,您将需要两名操作员,一名控制车辆另一名进行测量。
示例波形
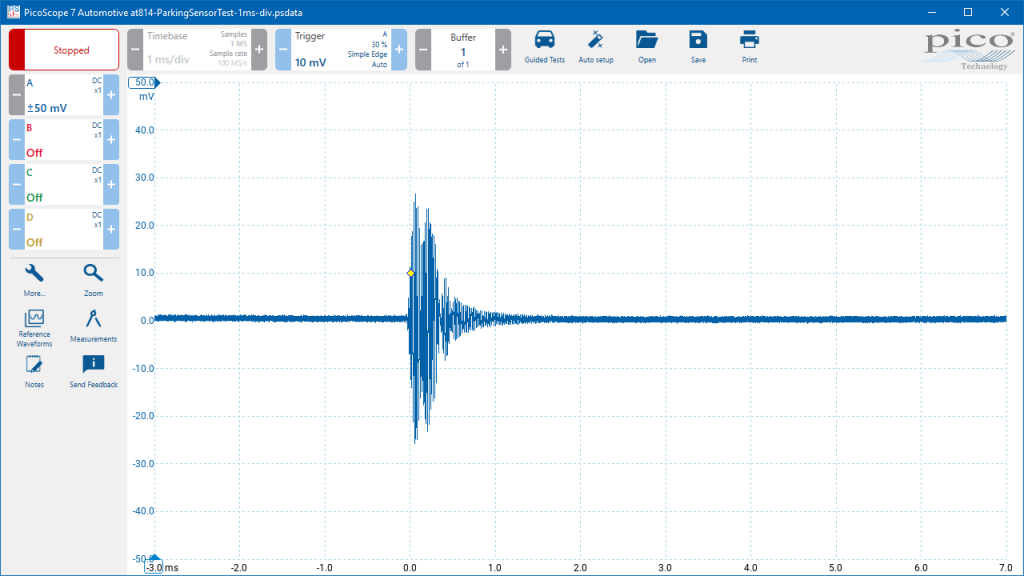
波形注意点
这个波形有以下特征:
- 波形为振荡脉冲,瞬间就达到其最高峰值,然后逐渐衰减。
- 脉冲的幅度大小取决于倒车雷达探头与泊车传感器的距离以及泊车传感器的性能。
- 通常情况下,当倒车雷达探头和泊车传感器保持在相同距离时,每个泊车传感器的脉冲幅度应该相同,但是车辆前后或车辆内外(围绕车辆中心线)可能存在一些偏差。
- 该脉冲振荡频率约为 40 kHz。
波形库
在 波形库 添加通道的下拉菜单中选择 Ultrasonic parking sensor detector output。
更多信息
一个典型的泊车传感器可以认为是包含一个发射器和一个接收器,内部压电装置用于通过空气产生高频脉冲,并将任何反射脉冲转换为表示距离的电压值。
泊车传感器由控制单元驱动足够长的时间以高频(约 40 kHz)激发压电元件,使得泊车传感器的表面发出压力脉冲。压力脉冲产生听不见的声波,它以超出人类听觉范围的频率振荡。
激发泊车传感器所需的时间很重要,因为压电元件必须立即以 40 kHz 共振,然后返回静止状态并等待任何反射。恢复静止需要时间,这个衰减时间称为振铃,代表压电元件产生声能的耗散。
在响铃期间,控制单元将暂停工作,然后再听取驻车传感器接收到的任何反射信号,否则振铃可能会干扰和掩盖任何反射的压力波。
当声波离开泊车传感器表面时,压电元件接收任何反射声波所需的时间决定了泊车传感器与反射物体之间的距离。
泊车传感器的正确运行取决于它们的位置/方向(售后配件)、线束连接性、表面污染或退化、控制单元功能以及它们的运行环境是否远离密集的电磁和超声波活动源。
在依次将倒车雷达探头与车辆的每个泊车传感器保持在相同距离和位置测试后,比较脉冲的幅度以判断是否有传感器不正常或者输出较弱。
免责声明
此帮助主题如有更改,不另行通知。所包含的信息经过仔细检查并认为是正确的。此信息是我们研究和检测的一个例子,并不是固定的程序。对于不正确之处,Pico Technology不负任何责任。每个车辆都会不一样,且要求唯一的测试设置。